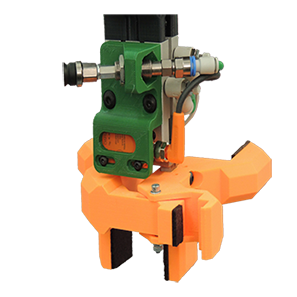
DOUBLE GRIPPER FOR TRAINING ROBOT
AA096.001.04
- E-PNEUMATICS
Features:
Pneumatic gripper with:
• 2 parallel fingers, size 20
• Effective external finger grip force 42 N/effective internal finger grip force 66 N
• Stroke 10 mm
• Weight: 235 g
• 4 mm flow valves
• 2 inductive sensor for open/close positon detection
Pneumatic suction cup with in-line ejector with:
• Operating pressure 0.1 ~0.6 MPa
• Suction flow 7 l/m
• Air consumption 14 l/m
• Operating temperature -5 - 50 celsius degrees
IFM deffuse reflection sensor with background suppression for part detection:
• Dimensions 46 x 13 x 21
• Operation voltage 10 - 30V DC
• Current consumption 22 mA at 24V
• Red light
• PNP
• Switching frequency DC 1 KHz
• Range 2 - 200 mm
The assembly has 3 working points on the gripper and one on the pneumatic suction cup. It includes application-specific 3D printed fingers and mechanical grip fitting on the ABB IRB120 robot